It took me a little longer but i finished my version of Johannes FOC controler. It is based on Rev.2 board design. It has all usual I/Os.
It uses 2 current sensors. to run either ACIM motor with single or AB encoder or PMSM motor with resolver.
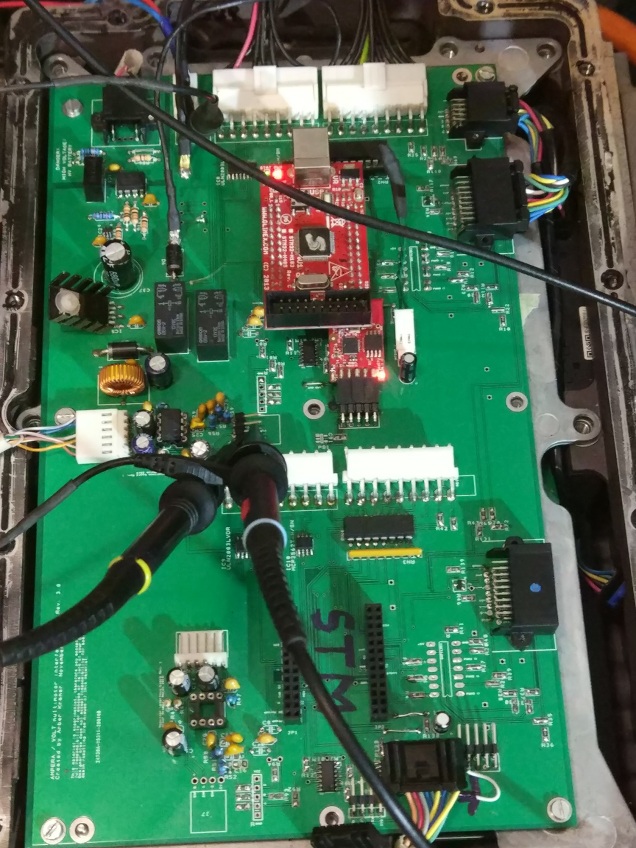
I adapted my PCB design to have dual self sustaining interfaces on a single board.
There is a single 5V power supply and one voltage sensor to signal precharge to both boards.
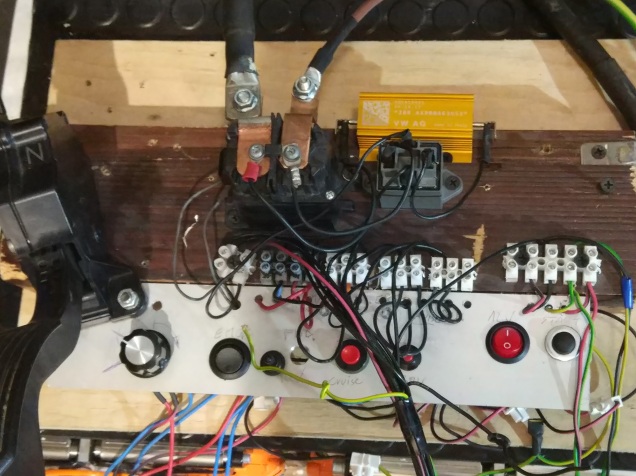
Both boards are independently run via throttle control. I built a car simulator to have similar inputs and outputs as are available in a car.
I included CAN bus chip on each controller so it is possible to run them via CAN protocol.
First test of PMSM motor running was good with FOC code. It is a Remy HVH 250 motor with resolver.
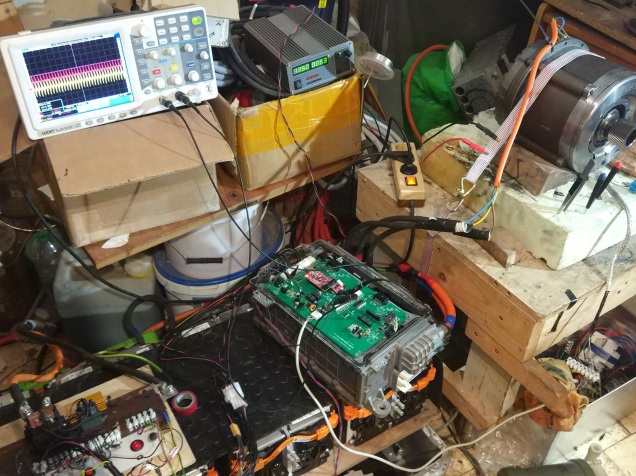
Resolver connection is very important. I extended the original resolver wires and made a connection in the same order. I tried to use wires of similar colour.



ACIM motor is run natively by single channel encoder with slip contr ol.
